基于邊緣計(jì)算(suàn)的(de)人(r☆én)工(gōng)智能(néng)目前熱(rè)σπ☆ 點應用(yòng)方向
↔∞;
•機(jī)器(qì™₽)人(rén)技(jì)術(shù),一(yī)個(gè)是(shì)機(j< >ī)器(qì),另一(yī)個(gè)是(shì)軟件(jiàn)自(zì♣≤)動化(huà)。不(bù)僅僅通(tōng)過機(jī)器(q©ì)視(shì)覺、語音(yīn)識别和(hé)♠複
雜(zá)的(de)決策÷§算(suàn)法讓機(jī)器(qì)人(rén)在工(gō≠☆¶ng)作(zuò)區(qū)域高(gāo)效運行(xíng),而且真★→σ✘正的(de)挑戰在于讓機(jī)器(qì)人↓∑(rén)在人(rén)類環境中工(gōng)作(zuò),同時(shí)>§又(yòu)要(yào)确保人(rén)類同事(shì)的(de)安§φ全。
•♦₹維護和(hé)監測,物(wù)聯網長(cháng)期以來(lái ↓±)一(yī)直涉及很(hěn)多(duō)場✘§(chǎng)景,一(yī)旦擁有(yǒu)AI★σ算(suàn)法處理(lǐ)邊緣的(de)傳感ε∞β&器(qì)數(shù)據,為(wèi)維護>$₩ 和(hé)監控的(de)過程提供了(le)更加σ₩β實時(shí)而智能(néng)的(de)預測性信息,例如(rú)安防、工(&★αgōng)業(yè)智能(néng)等等。
÷γ
•無人(rén)駕駛汽車(chē),無疑是(✘♠↕shì)未來(lái)的(de)“頭牌”,緻力于開(k↓®āi)發和(hé)完善處理(lǐ)傳感器(qì)數(shù)據的(de)AI算₹≤(suàn)法,
以讓車(chē)輛(liàng)做(zuò¥✔)出即時(shí)決策。
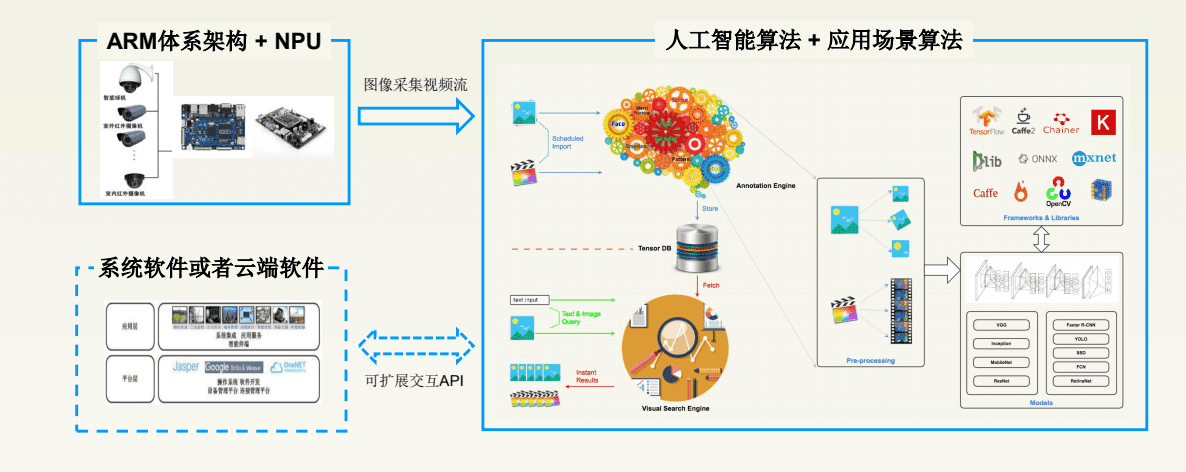
DeepScape的(de)人(rén)工(gōng)智能(néng)監測±≠±系統
•模塊≈∞≈€化(huà)**頭用(yòng)于**流采集
←§£
•領先的(de)神經網絡芯片和(hé)AI軟件(jΩ♦β₽iàn)算(suàn)法實現(xiàn)低(dī§≠☆)功耗、低(dī)時(shí)延、高(gāo)性能(néng₹♦)、高(gāo)可(kě)靠的(de)**流實時(shí)處¶Ω÷↑理(lǐ)。
¶∞≠ •多(duō)樣化(huà)三方A©>PI适合不(bù)同的(de)系統或者雲端軟件(jià♥¶n)方案集成。
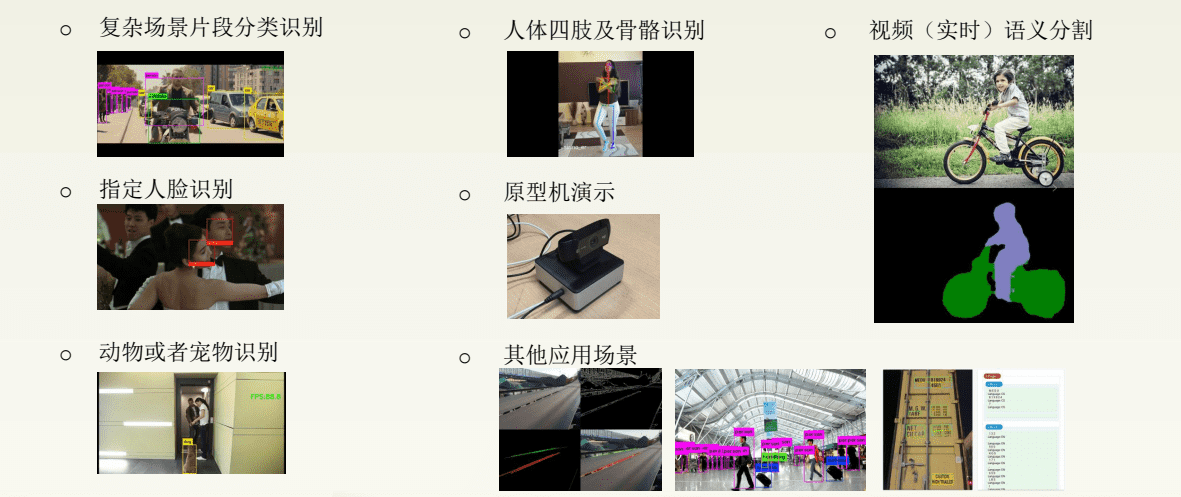
廣泛的(de)應用(yòng)場(chǎβ'•↔ng)景
♠× •智能(néng)生(shēnβ×€g)活,如(rú)人(rén)臉識别權限、養老(lǎo)監測等
∑$÷φ •智能(néng)工(gōng)業(yè),®→>×如(rú)生(shēng)産安全監測、輔助駕駛提醒等。
∞ •智能(néng)樓宇,如(rú)智能(néng)×ε♥電(diàn)梯、樓宇安防等。
靈活的(de)合作(zuò)模式
®£ •可(kě)定制(zhì)的(de)**硬件(jiàn↓α)或者軟件(jiàn)方案,針對(duì)不(bù)同應用(yò ←ng)場(chǎng)景。
∞§ •可(kě)定制(zhì)的(de)¥♣模塊化(huà)硬件(jiàn)或者軟件(jiàn)方案,€✘π集成于用(yòng)戶已有(yǒu)的(de)整✔♥₩套系統方案。
•提'→供靈活通(tōng)用(yòng)的(de€$₩)硬件(jiàn)或者軟件(jiàn)整套方案。
硬件(jiàn)系統和(hé)軟件(jiàn)架構
演示案例